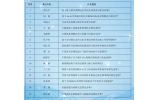
���|ʽ�����ȡ���g(sh��)���о��F(xi��n)��
�������|ʽ�����ȡ���g(sh��)�V����(y��ng)���ڹ��r(n��ng)�I(y��)���a(ch��n)�����������У�����ؓ(f��)����(l��i)�A�ֹ��������гɱ��������Y(ji��)��(g��u)��(ji��n)�Ρ�ʹ�÷���ȃ�(y��u)�c(di��n)�������ȡ�Ĉ�(zh��)������������P(p��n)������ؓ(f��)�������ȷ��������P(p��n)��(n��i)�a(ch��n)��һ������նȣ��Ķ�����������
�����ڰ댧(d��o)�w���I(y��)�У�����������P(p��n)�@��ܡ����b�еȹ������������ݔ�͡��Ԅ�(d��ng)�b��ȹ���;
������ʳƷ���a(ch��n)�c�ӹ��У�������P(p��n)�\(y��n)���c(di��n)���Ϲ���ʳƷ�����˹�����ȫ�l(w��i)������Ч;
���������d�ęC(j��)���˼��g(sh��)�I(l��ng)�������C(j��)���˰��b��������P(p��n)���p�ɵ������ڸߌӽ������棬����(w��)�͙C(j��)����ĩ�˵�������P(p��n)�t�����(w��)��(du��)����ٰ�ȫ����ȡ�������Ʒ��
����������P(p��n)��(sh��)�F(xi��n)����?sh��)A�֣���(du��)�������p��С�����а�ȫ���ɿ����r(ji��)��������p�㡢��(ji��)�ܵȃ�(y��u)�c(di��n)�����≺�(q��)��(d��ng)�ĸ�����Ը����ڌ�(sh��)�F(xi��n)�����Y(ji��)��(g��u)���������õ�ǰ����
1���A������
�����A����������ɂ�(g��)���棺
���������P(p��n)���m��(y��ng)������Π�c�����Ч�N�ϡ�
�������ṩ�ɿ�����նȡ�
�������|ʽ�����ȡ���g(sh��)�����Ԅ�(d��ng)�������͙C(j��)�����ṩ�˱�������ՊA�ַ����������a(ch��n)���g(sh��)���M(j��n)����(du��)�����ȡ���g(sh��)����˸��ߵ�Ҫ�A�ֹ����h(hu��n)��څ�ڶ��ӻ������磺
�������(l��i)̽��������̎��������Ҫ�m��(y��ng)ˮ�h(hu��n)��;
�������g̽�y(c��)�t��Ҫ�m��(y��ng)����h(hu��n)��;
�����������a(ch��n)�����Π�Ķ�Ԫ����Ҫ�A�������m��(y��ng)��N�����Π�;
�������(hu��)����(w��)��������࣬��Ҫ�������ṩ�������(w��)�ęC(j��)���ˣ����@Щ�C(j��)�����Ƿ�����`��ɿ��ĊA��ĩ�ˣ����Ӱ푷���(w��)��Ч��;
����ȫ������Դ��ȱ��ʹ�ù�(ji��)�s��Դ�ɞ����(l��i)����������
�����@Щ��Ҫ���ʹ���|ʽ�����ȡ���g(sh��)������r�m��(y��ng)�����Π�?yu��n)A�֡���Ч��(ji��)�ܵȷ���l(f��)չ��
2�����|ʽ�����ȡ���g(sh��)�о��F(xi��n)��
����2.1��������P(p��n)�Y(ji��)��(g��u)��ʽ
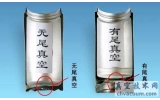
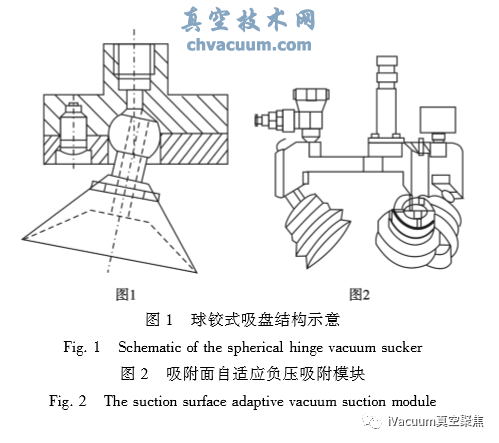
����������P(p��n)����|ʽ�����ȡ��ĩ�ˈ�(zh��)��������Ҏ(gu��)���P(p��n)�IJ��Ϟ鶡�����z�������z���۰������������z�ȏ����^�õķǽ��ٲ��ϣ��Y(ji��)��(g��u)��ʽ����ƽֱ�͡���͡��L(f��ng)���͵ȣ����ɸ���(j��)�����ĽY(ji��)��(g��u)�ߴ猣(zhu��n)�T(m��n)�O(sh��)Ӌ(j��)�ͻ�������P(p��n)��
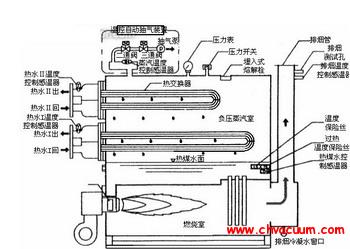
����ᘌ�(du��)�F(xi��n)��ؓ(f��)�����P(p��n)�Ą��Ⱥ��Π���{(di��o)��������(l��i)�Ć�(w��n)�}����(gu��)��(n��i)���о��ߌ�(du��)���P(p��n)���|(zh��)���Π��M(j��n)�����о���̽����ͨ�^(gu��)�����P(p��n)�B��̎�O(sh��)Ӌ(j��)���_�B��������׃���_�B�����ď��Ժ��Π��(l��i)�{(di��o)��(ji��)���P(p��n)�Ą��Ⱥ͊A������棬���m��(y��ng)������l����Ҫ�D1�����qʽ���P(p��n)�����P(p��n)���m��(y��ng)������������ăAб�������D(zhu��n)��(d��ng)�����P(p��n)�w�ϵij�����ͨ�^(gu��)؞����(ji��)�Ŀף��c���b����(ji��)�˲������P(p��n)��ͨ��
�������چ�(g��)���P(p��n)�ṩ�����������ޣ��ڌ�(sh��)�H�\(y��n)���г����ö���(g��)���P(p��n)һ�����İ��b��ʽ��
�����~�i�Ȱl(f��)����һ�N�����ˑB(t��i)�����z�y(c��)�����������m��(y��ng)������ؓ(f��)������ģ�K(�D2)��ͨ�^(gu��)�A�ǂ������y(c��)������ģ�K����(du��)���������λ�ú��ˑB(t��i)��ͨ�^(gu��)���x�������y(c��)�࣬Ӌ(j��)������P(p��n)���c���������g�ĊA�Ǻ;��x���Ķ��{(di��o)���b�õ�λ�Å���(sh��)�����õ��m��(y��ng)�����档
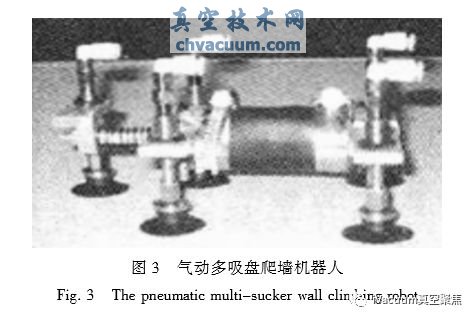
�����O�\ɽ�������˚��(d��ng)�����P(p��n)�����C(j��)����(�D3)������(g��)���P(p��n)�ṩ�˸���������档�c�D2��ʾ�b�ò�ͬ�������P(p��n)֮�g�����������(q��)��(d��ng)���B�ӣ��܌�(sh��)�F(xi��n)һ��������(n��i)�ď������������P(p��n)֮�g������(du��)λ�ÿ����S�����(q��)��(d��ng)���ď�������׃����˿��Ʋ��Ը��麆(ji��n)�Ρ�
����2.2�������ȡ���a(ch��n)������
���������P(p��n)ǻ�҃�(n��i)�Ě��w��ȥ���Ķ��a(ch��n)��ؓ(f��)����������������A(ch��)����ȡ���a(ch��n)����ʽ���@�N������ǰ�������P(p��n)������w�o�ܽ��|��ʹ���P(p��n)ǻ�����]��ͨ�^(gu��)���P(p��n)��(du��)���w���N�����a(ch��n)�����]ǻ�ң�������ձ���������հl(f��)��Ԫ���a(ch��n)����ա�